News
[2025/11] 🎉 I was selected as the only candidate from the School of EECS to run for Peking University Person of the Year.
[2025/09] I win the National Scholarship for the third time.
[2025/06] I am honored to receive the SenseTime Scholarship.
[2025/02] 🎉 One paper get accepted by CVPR 2025.
[2025/01] 🎉 I am honored to be the only recipient in the college this year awarded the Beijing Municipal Triple-A Student
[2024/11] I receive the "North Star Scholarship" (45,800 RMB) by the Palm Avenue Institution.
[2024/09] 🎉 I am honored to receive the National Natural Science Foundation to do futher Research on Key Technologies of Embodied Intelligence in Multi-modal Large Model
[2024/09] I win the National Scholarship for the second time.
[2024/09] 🎉 One paper get accepted by NeurIPS 2024.
[2023/09] I am honored to be selected for the Peking University School of Computer Science Elite Program.
[2023/09] I am honored to receive the National Scholarship for the first time.
|
Research
My research interest is broadly in Robotics and 3D Computer Vision, with particular
interests in generalizable object perception, understanding and manipulation currently. My research objective
is to build an intelligent agent with the robust and generalizable ability to perceive and interact
with a complex real-world environment.
|
|
GarmentLab: A Unified Simulation and Benchmark for Garment Manipulation
Haoran Lu*, Ruihai Wu*, Yitong Li*,Sijie Li,Ziyu Zhu,Chuanruo Ning,Yan Shen,Longzan Luo,Yuanpei Chen,Hao Dong
(*equal contribution)
Paper /
Project /
Code /
Bibtex
@misc{lu2024garmentlabunifiedsimulationbenchmark,
title={GarmentLab: A Unified Simulation and Benchmark for Garment Manipulation},
author={Haoran Lu and Ruihai Wu and Yitong Li and Sijie Li and Ziyu Zhu and Chuanruo Ning and Yan Shen and Longzan Luo and Yuanpei Chen and Hao Dong},
year={2024},
eprint={2411.01200},
archivePrefix={arXiv},
primaryClass={cs.RO},
url={https://arxiv.org/abs/2411.01200},
}
NeurIPS 2024
GarmentLab provides realistic simulation for diverse garments with different physical propoerties, benchmarking various novel garment manipulation tasks in both simulation and the real world.
|
|
|
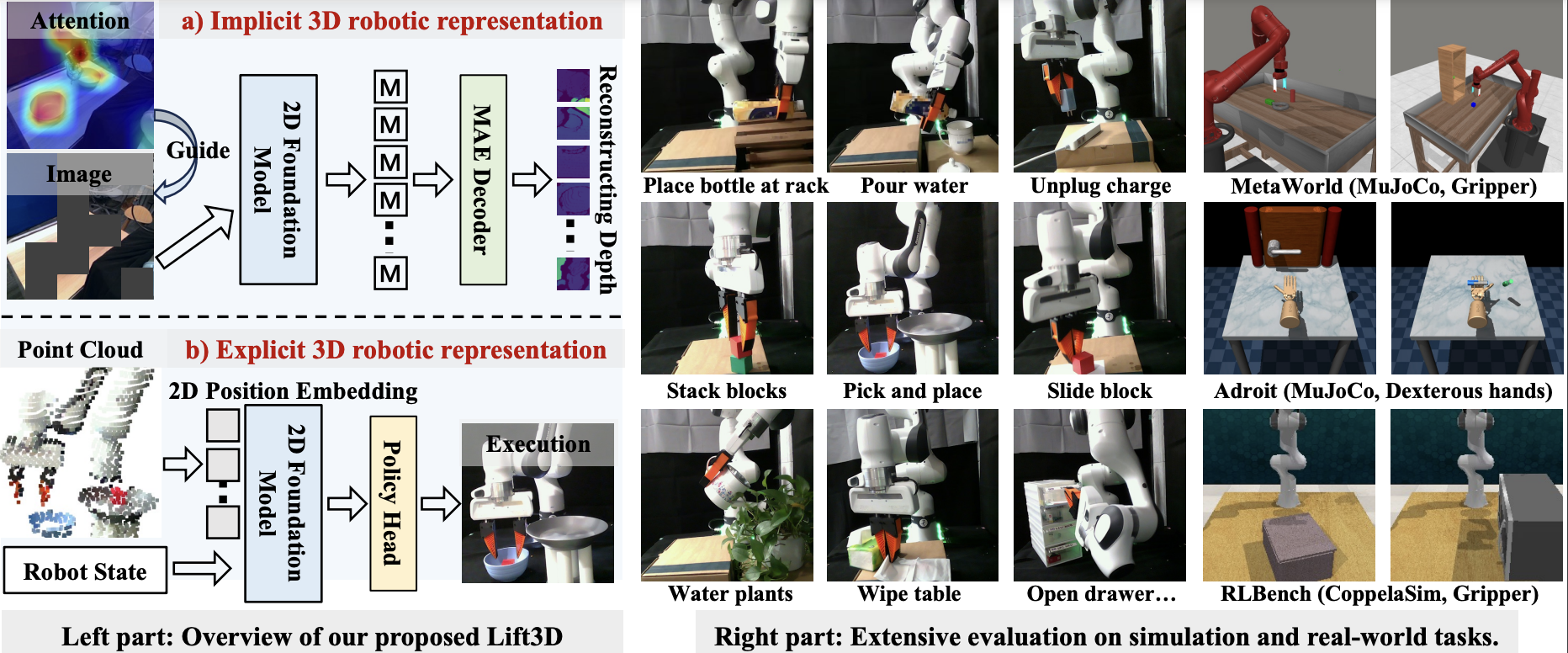
Lift3D Foundation Policy: Lifting 2D Large-Scale Pretrained Models for Robust 3D Robotic Manipulation
Yueru Jia*, Jiaming Liu*†, Sixiang Chen*, Chenyang Gu, Zhilue Wang, Longzan Luo, Lily Lee, Pengwei Wang, Renrui Zhang†, Zhongyuan Wang, Shanghang Zhang✉
(*equal contribution)
Paper /
Project /
Code /
Bibtex
@misc{jia2024lift3dfoundationpolicylifting,
title={Lift3D Foundation Policy: Lifting 2D Large-Scale Pretrained Models for Robust 3D Robotic Manipulation},
author={Yueru Jia and Jiaming Liu and Sixiang Chen and Chenyang Gu and Zhilue Wang and Longzan Luo and Lily Lee and Pengwei Wang and Zhongyuan Wang and Renrui Zhang and Shanghang Zhang},
year={2024},
eprint={2411.18623},
archivePrefix={arXiv},
primaryClass={cs.CV},
url={https://arxiv.org/abs/2411.18623},
}
CVPR 2025
We propose the Lift3D framework, which progressively enhances 2D foundation models with implicit and explicit 3D robotic representations to construct a robust 3D manipulation policy.
|
Services
Reviewer, NeurIPS, CVPR
Secretary, The 5th Undergraduate Party Branch, School of EECS, Peking University
Team Leader, The 45th Student Party Spirit Education Reading Class
Peer Mentor, "Yanyuan Qihang" Program, PKU Student Financial Aid Center
|
Selected Awards and Honors
2025: National Scholarship
2025: SenseTime Scholarship
2025: Beijing Municipal Triple-A Student
2024: National Scholarship
2024: Pacemaker to Merit Student
2023: National Scholarship
2023: Merit Student
|
Teaching
Teaching Assistant, Introduction to Computing A
Instructor, Introduction to Computing B, PKU Student Financial Aid Center
|
This homepage is designed based on Jon Barron's website and deployed on Github Pages. Last updated: December. 2, 2025
© 2025 Longzan Luo
|